
ICRA (Accepted), 2026 Best Paper Award Finalist on Robot Learning
We present a fully autonomous hierarchical framework for cable routing that integrates vision–language models (VLMs) for high-level reasoning with reinforcement learning (RL) for low-level control. The system interprets language goals, generates multi-step plans, and recovers from failures, achieving a 92.5% success rate across diverse long-horizon scenarios.
*Equal contribution
ICRA (Accepted), 2026
To bridge the gap between robotic action and language understanding, we introduce a unified vision-language framework that learns both language-to-action (L2A) and action-to-language (A2L) mappings within a vision-language model. By jointly training on action generation, explanation, and consistency verification (L2C), LACY can generate new data without human annotation.
ICRA, 2025
To address the high flexibility of ropes and their frequent contact with uncertain environments, we propose a reinforcement learning and diffusion policy–based framework for robust and delicate deformable linear object (DLO) routing. This enables gentle, contact-aware manipulation that prevents rope damage while remaining robust in rough environments.
*Equal contribution
ICRA, 2025
We propose a CLIP-based parameter-efficient tuning (PET) framework that enables lightweight, adaptable multimodal learning for referring expression segmentation and referring grasping tasks. Our approach introduces a bi-directional vision-language adapter for pixel-level grounding and a depth fusion branch to integrate geometric cues. The model achieves state-of-the-art grounding accuracy while demonstrating strong generalization to spatial reasoning and multi-object scenarios with minimal computation.
ICRA, 2024
Manipulating deformable linear objects such as wires, rubber, and ropes is essential for robotic automation but difficult due to their diverse material properties. We propose a two-stage framework that first estimates material flexibility from visual cues, then uses reinforcement learning to perform insertion tasks conditioned on this estimation. The flexibility estimation module learns material characteristics in simulation and generalizes to real-world interaction. Our approach achieves 85.6% success in simulation and 66.7% on real robots, demonstrating strong adaptability across different DLO types.
*Equal contribution
RA-L, 2023
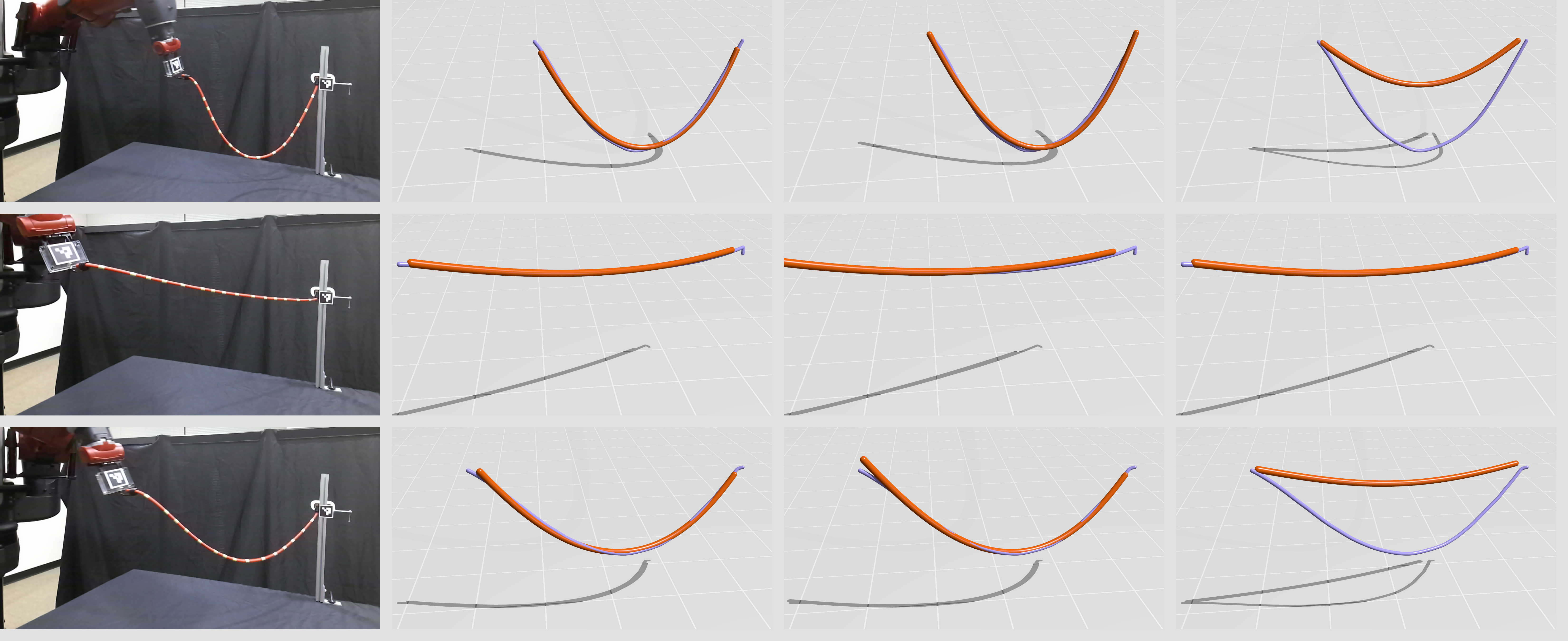
Modeling and controlling rope-like deformable objects is vital for tasks such as autonomous suturing but remains challenging due to complex physics and real-to-sim discrepancies. We introduce a differentiable compliant position-based dynamics (XPBD) framework that accurately models rope behavior through geometric constraints capturing stretch, shear, bend, and twist effects. The differentiable formulation enables parameter estimation and real-to-sim adaptation, making it well suited for optimization and learning. Experiments with Baxter and the da Vinci Research Kit (DVRK) validate its robustness and accuracy across diverse rope materials.
*Equal contribution
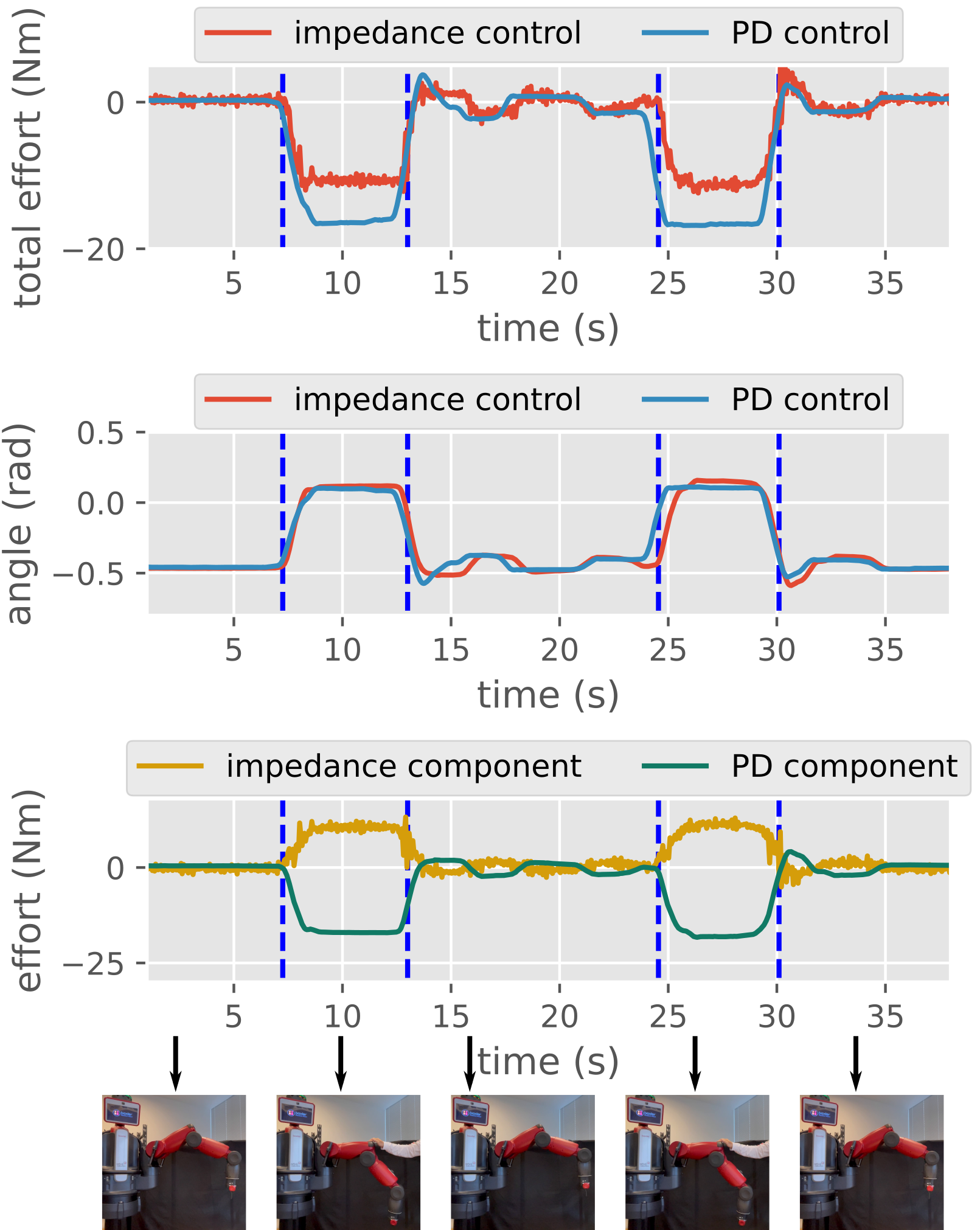
Accurate and differentiable simulation modeling is essential for robot control, design, and learning, yet most existing simulators sacrifice either speed, stability, or differentiability. We introduce a differentiable position-based dynamics (PBD) framework that unifies articulated robot modeling, optimal design, and model-based control within a single simulation pipeline. The framework provides native gradients through automatic differentiation over positional and angular constraints, enabling efficient optimization across robot parameters and motion. We validate its capability through optimal robot design, torque and stiffness estimation, and real-world impedance control, showing strong accuracy and real-to-sim consistency.
Teaching
- Teaching Assistant, EE 2361 Introduction to Microcontrollers , Spring 2024, Spring 2025
- Teaching Assistant, EE 5271 Robot Vision, Fall 2023, Fall 2024
- Teaching Assistant, EE 3006 Fundamentals of Electrical Engineering Laboratory, Fall 2023
Professional Service
- Conference Reviewer: IROS (2024), ICRA (2024, 2025, 2026)
- Journal Reviewer: RA-L